-
以下包含了:
轮式车辆 - 平坦地面行使
轮式车辆 - 在单坡和双坡上行驶
轮式车辆 - 斜坡横行
履带车 - 坦克牵引力试验
履带车 - 原地转向
履带车 - 在双坡上行驶
履带车 - 反复压实测试
全地形车 - 爬坡
轻型装甲车 - 爬坡
基于EDEM离散元仿真技术的研究。
案例一:轮式车辆
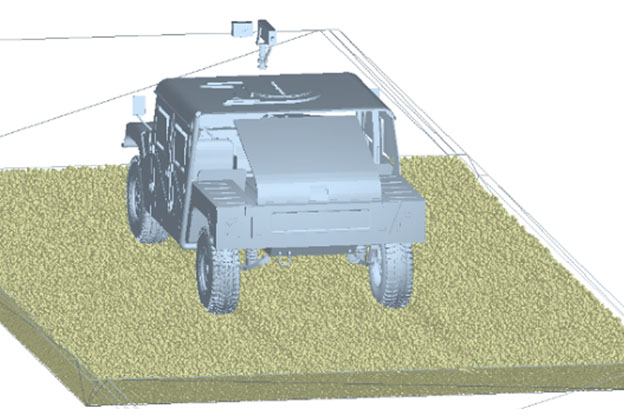
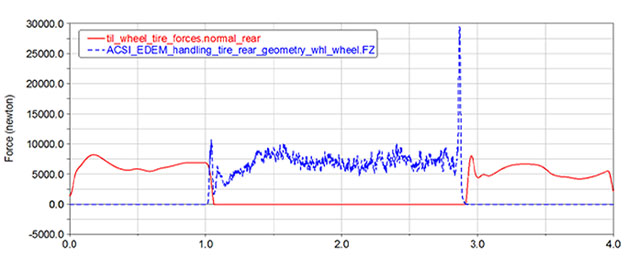
轮式车辆 - 平坦地面行使
使用EDEM – MBD耦合,如图所示案例,比较了车辆从坚硬的平坦地面(红色)向松软地面(蓝色)过渡时所受的载荷,
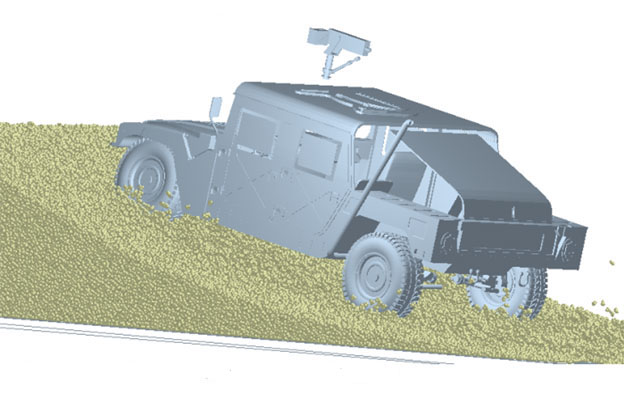
轮式车辆 - 在单坡和双坡上行驶
案例 1 - 显示了车辆以20km/h的速度在单坡上行驶时,车辆的前车轮陷入在松软土壤中的情况
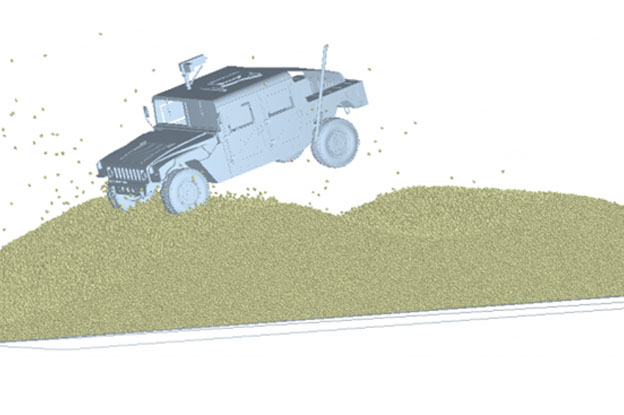
案例 2 – 显示了车辆以40km/h的速度在双坡上行驶时,车可以顺利冲上第一个坡,并在第一个坡顶上腾飞起来,之后直接越过坡谷并撞击在第二个坡顶上,导致了着落点的土壤发生了“飞溅”的现象。
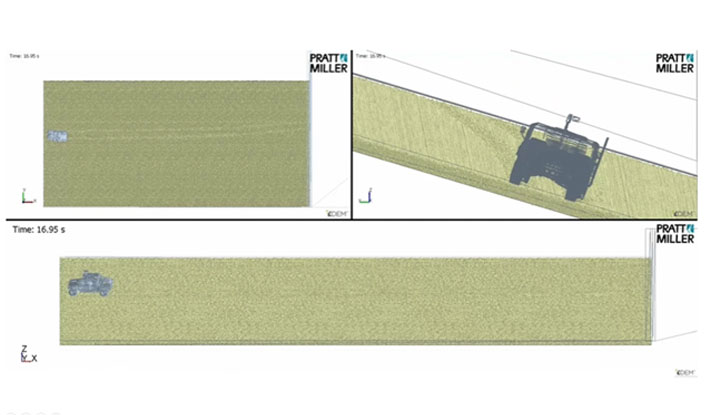
轮式车辆 - 斜坡横行
第二次机动测试显示,车辆在侧坡上行驶的过程。在EDEM中可以使用颗粒床生成工具生成大型物料堆。这里的目的是用于识别车辆如何在侧坡中行驶以及发生了漂移后如何恢复。在Adams中将转向控制器设置为在侧坡时保持直线。
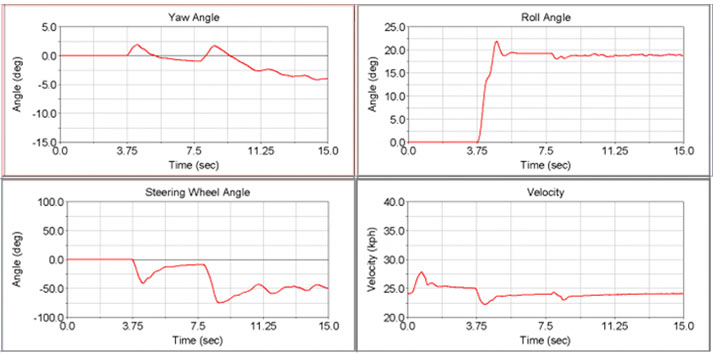
当转向系统对可获得的摩擦力减少,车辆开始沿着斜坡下滑,并进行补偿,直到车辆开始向期望的直线路径恢复为止。
当开始仿真时,车辆行驶在平坦且坚硬的路面上,在大约3.75秒的时间时开始逐渐符合EDEM的斜率
当车辆进入松软土壤时,车辆最初偏向左侧,而后轮仍在坚硬的地面上。一旦整个车辆进入松软的土壤时,就开始向斜坡上漂移,转向控制器通过增加角度的方式来返回到直线路线,从而使得车辆向相反的方向偏航。在仿真结束时,偏航已稳定,转向角度保持为直线运动。
案例二:履带车
履带车 - 坦克牵引力试验
因无法用传统方法或仅使用Adams软件来执行复杂的测试场景,该案例使用了EDEM-Adams耦合分析。
在本实例中,目的是对坦克进行牵引力拉力试验,即车辆被连接到一个重物上,然后将功率调至最大。这时,我们可以清晰地看到了履带车在松软地面上发生了严重的打滑现象。
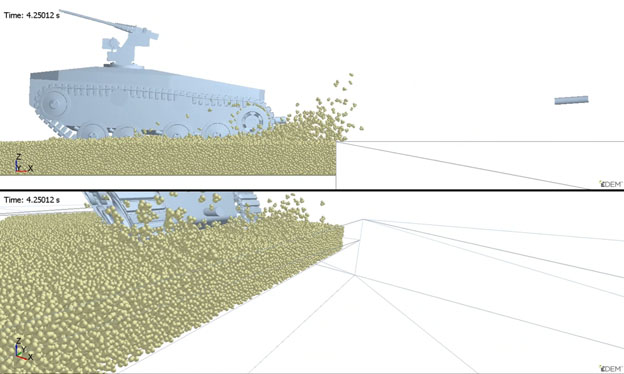
履带车 - 原地转向
原地转向测试为研究车辆能以多快的速度实现原地转向。
如果坦克转得太快,则它变得太不稳定,就会严重地破坏地面或损害本身,甚至导致自身无法移动。
此时,我们可以看到车辆在松软土壤中转动时,会逐渐陷入土壤中,增大了土壤与履带之间的摩擦力,导致其难以逃脱。
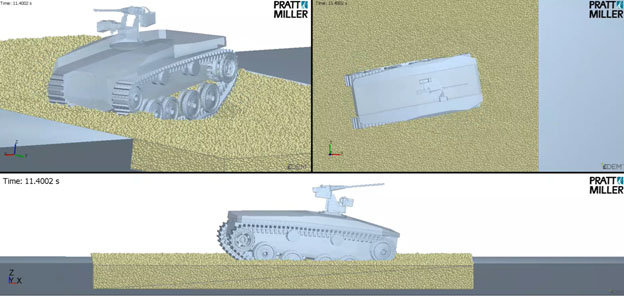
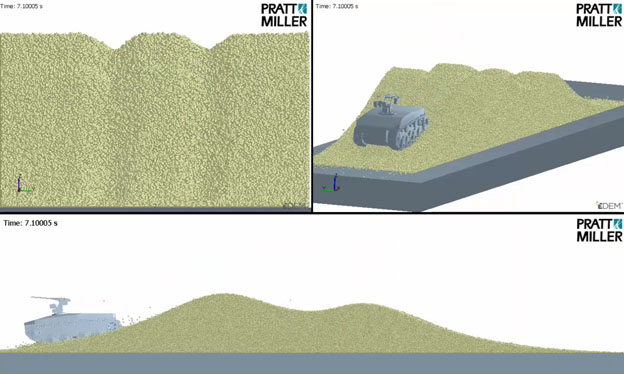
履带车 - 在双坡上行驶
如视频所示,坦克在双坡上行驶。
案例1-以10km/h速度行驶,坦克不能顺利通过第一个坡;
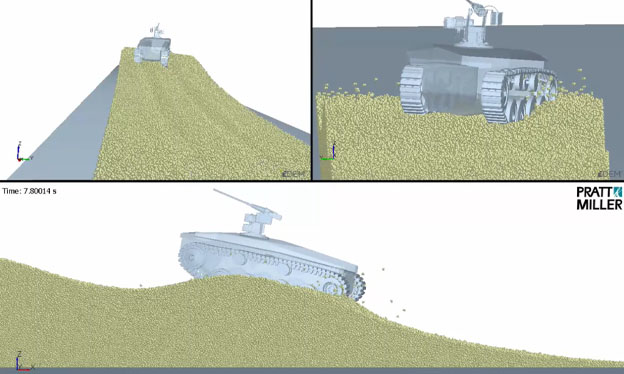
案例2-以14.5km/h速度行驶,坦克成功爬上两个坡。
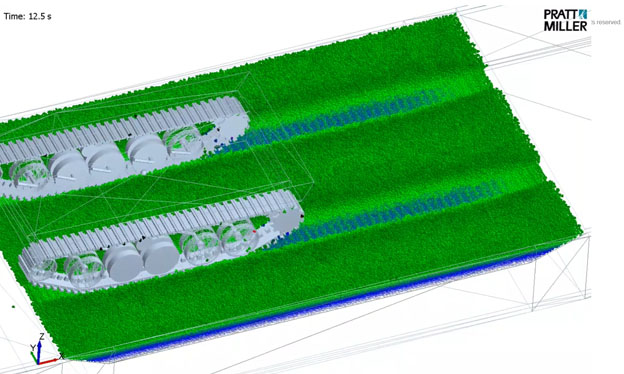
履带车 - 反复压实测试
为了研究很多车辆通过同一颗粒床时对其所造成的损坏,如图所示,对所显示的场景进行建模。这里的目的是为了查看很多车辆是否能够通过相同的松软地面。
这个场景可以通过EEPA接触模型所提供的功能来进行建模。该物理模型可以捕捉到之前经过压实处理的模型,准确地反映车辆经过同一区域时的影响。
案例三:全地形车
EDEM-MBD 耦合仿真 (MotionSolve),建立复杂且压实状态的土壤模型,采用了先进的EEPA接触模型

案例四:轻型装甲车
轻型装甲车以8×8牵引力可补偿轮胎打滑,车辆可以轻松地以20km/h速度通过坡


